This post is devoted to te comparison of simulation results obtained by the following numerical methods:
- Explicit and implicit Euler methods,
- Trapezoidal rule,
- Midpoint rule,
- Discrete gradient method combined with PHS structure.
Read more
Import external modules¶
import sympy as sp # Symbolic computation module
import numpy as np # Numerical computation module
from scipy.optimize import root # Solver for implicit functions
import matplotlib.pyplot as plt # Figures rendering
# Figures rendering inline
%matplotlib inline
from IPython.display import set_matplotlib_formats
set_matplotlib_formats('png', 'pdf')
# Latex outputs
from sympy import init_printing
init_printing(use_latex='mathjax')
Parameters¶
# Hamiltonian
c11, c12 = 10, 1
c21, c22 = 1, 1
# Initialisation
x0 = np.array((8., 0.))
# Samplerate
fs = 10.
ts = fs**-1
# number of time-steps
nt = int(200*fs/5.)
System definition¶
$\frac{\mathrm d \mathbf x}{\mathrm d t} = \mathbf{J_x}\,\nabla\mathrm H(\mathbf x)$
Define symbols for the state¶
$\mathbf{x} = \left(\begin{array}{c} x_1\\ x_2\end{array}\right)$
# State
x = sp.symbols(['x1', 'x2'])
x
Define Hamiltonian function¶
$ \begin{array}{rcl} \mathrm H_1(x_1) &=& c_{1,1}\,\log\big(\cosh(c_{1,2}\,x_1)\big) \\ \mathrm H_2(x_2) &=& c_{2,1}\,\big(\cosh(c_{2,2}\,x_2)-1\big) \\ \mathrm H(\mathbf{x}) &=& \mathrm H_1(x_1) + \mathrm H_2(x_2)\\ \end{array} $
# Hamiltonian
H1 = c11*sp.log(sp.cosh(c12*x[0]))
H2 = c21*(sp.cosh(c22*x[1])-1)
H = H1 + H2
# define plots limits
lim_x1 = 2*x0[0]
H_lim = H1.subs(x[0], lim_x1)
lim_x2 = max(sp.solve(H2-H_lim, x[1]))
lims = (float(lim_x1), float(lim_x2))
# plot Hamiltonian components
print 'H =', H
sp.plot(H1, (x[0], -lims[0], lims[0]))
sp.plot(H2, (x[1], -lims[1], lims[1]))


Compute Hamiltonian's gradient¶
$\nabla\mathrm H(\mathbf x) = \left(\begin{array}{c} \frac{\partial \mathrm H(\mathbf x)}{\partial x_1}\\ \frac{\partial \mathrm H(\mathbf x)}{\partial x_2}\end{array}\right) $
# Hamiltonian's gradient
dxH1 = H.diff(x[0])
dxH2 = H.diff(x[1])
dxH = sp.Matrix([[dxH1],[dxH2]])
dxH
sp.plot(dxH2, (x[1], -lims[1], lims[1]))
sp.plot(dxH1, (x[0], -lims[0], lims[0]))


Define structure matrix¶
$\mathbf{J_x}= \left(\begin{array}{rr} 0 & -1\\ +1&0\end{array}\right)$
# Structure matrix
Jx = sp.zeros(2)
Jx[0,1] = -1
Jx[1,0] = 1
Jx
Build numerical evaluation of symbolic expressions¶
# Numerical evaluations of the Hamiltonian
H_num = sp.lambdify(x, H, "numpy", dummify=False)
# Numerical evaluations of the Hamiltonian's gradient
dxH_num = sp.lambdify(x, dxH, "numpy", dummify=False)
# Numerical evaluations of the structure matrix
Jx_num = sp.matrix2numpy(Jx, dtype = float)
Plot functions¶
def get_data(x):
"return x1, x2 and H(x1, x2) for all x such that x_i is in [-limsi, limisi], i=(1, 2)"
x1 = [el[0] for el in x]
x2 = [el[1] for el in x]
if np.max(np.abs(x1))>np.max(np.abs(lims[0])):
indlimitx1 = map(lambda x: x<np.max(np.abs(lims[0])), np.abs(x1)).index(False)
else:
indlimitx1 = len(x1)
if np.max(np.abs(x2))>np.max(np.abs(lims[1])):
indlimitx2 = map(lambda x: x<np.max(np.abs(lims[1])), np.abs(x2)).index(False)
else:
indlimitx2 = len(x2)
indlimitx = np.min([indlimitx1, indlimitx2])
x1 = x1[:indlimitx]
x2 = x2[:indlimitx]
H = map(lambda xk1, xk2: H_num(xk1, xk2), x1, x2)
return x1, x2, H
def plot_H_surface(ax):
'''
Plot the surface H(x1, x2).
axe is a 3D matplotlib.pyplot.axes (x1, x2, H) for -limsx1<x1<limsx1, -limsx2<x2<limsx2."'''
from matplotlib import cm
npplot = 200
xp1 = np.linspace(-lims[0], lims[0], npplot)
xp2 = np.linspace(-lims[1], lims[1], npplot)
X1, X2 = np.meshgrid(xp1, xp2)
HH = np.zeros(X1.shape)
for i in range(npplot):
for j in range(npplot):
HH[j, i] = H_num(xp1[i], xp2[j])
surf = ax.plot_surface(X1, X2, HH, rstride=1, cstride=1, cmap=cm.BuPu,
linewidth=0, antialiased=True, alpha=0.6)
def plot_traj_3D(x, title=None):
" 3D plot of energy and the given state trajectory, with state space as base"
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure()
ax = fig.gca(projection='3d')
plot_H_surface(ax)
x1, x2, H = get_data(x)
ax.plot_wireframe(np.array(x1), np.array(x2), H)
ax.plot_wireframe(np.array(x1), np.array(x2), 0)
ax.scatter(np.array(x1[:1]), np.array(x2[:1]), H[:1], c='r', marker='x')
ax.scatter(np.array(x1[:1]), np.array(x2[:1]), 0, c='r', marker='x')
ax.set_xlim(-lims[0], lims[0])
ax.set_ylim(-lims[1], lims[1])
# ax.set_zlim(0, 2*H[0])
ax.set_xlabel('x1')
ax.set_ylabel('x2')
ax.set_zlabel('H(x1, x2)')
if title is not None:
plt.title(title)
plt.savefig(title + '3D_fs' + str(fs) + '.pdf')
def plot_contour():
'''
Plot the surface H(x1, x2).
axe is a 3D matplotlib.pyplot.axes (x1, x2, H) for -limsx1<x1<limsx1, -limsx2<x2<limsx2."'''
from pylab import contourf
Nticks = 100.
axe_x1 = np.linspace(-lims[0], lims[0], Nticks)
axe_x2 = np.linspace(-lims[1], lims[1], Nticks)
X, Y = np.meshgrid(axe_x1, axe_x2)
Z = H_num(X, Y)
cmap = 'BuPu'
alpha = 1
NLevels = 30
linestyles = 'dash'
from pylab import contourf
contourf(X, Y, Z,
NLevels, alpha=alpha, linestyles=linestyles , antialiased=False, cmap=cmap)
def plot_traj_2D(x, title=None, ax=None):
"Plot the trajectory of state x in state space x1=x[0], x2=x[1]."
if ax == None:
fig = plt.figure()
ax = plt.axes()
ax.set_xlabel(r'x1')
ax.set_ylabel(r'x2')
ax.plot(0,0,'ko')
plot_contour()
ax.set_xlim(-lims[0], lims[0])
ax.set_ylim(-lims[1], lims[1])
x1, x2, _ = get_data(x)
ax.plot(x1, x2, '-b')
ax.plot(x1[0],x2[0],'ro')
ax.set_xlabel('x1')
ax.set_ylabel('x2')
if title is not None:
plt.title(title)
plt.savefig(title + '2D_fs' + str(fs) + '.pdf')
def plot_trajs(x, title=None):
plot_traj_3D(x, title=title)
plot_traj_2D(x, title=title)
def rel_delta_energy(x):
"get sequence of H(x) and return sequence of errors on energy conservation"
_, _, H = get_data(x)
return abs(np.diff(H)/H[0])
def plot_delta_energy(ax=None):
# time vector
nt_here = int(nt/7)
t = np.linspace(0, (nt_here-1)*ts, nt_here)
if ax == None:
ax = plt.axes()
deltaH = rel_delta_energy(x_shp[:nt_here])
ax.semilogy(t[:len(deltaH)], deltaH,'-',label=r'Disc. grad.',linewidth=2)
deltaH = rel_delta_energy(x_midpoint[:nt_here])
ax.semilogy(t[:len(deltaH)], deltaH,'--',label=r'Midpoint',linewidth=2)
deltaH = rel_delta_energy(x_trapez[:nt_here])
ax.semilogy(t[:len(deltaH)], deltaH,'-.',label=r'Trapezoidal',linewidth=2)
deltaH = rel_delta_energy(x_euler_imp[:nt_here])
ax.semilogy(t[:len(deltaH)], deltaH,':',label=r'Euler impl.',linewidth=2)
deltaH = rel_delta_energy(x_euler_exp[:nt_here])
ax.semilogy(t[:len(deltaH)], deltaH,'--',label=r'Euler expl.',linewidth=2)
# ax.legend(loc=0)
ax.set_title(r'$\epsilon_k = ({\mathrm{H}(\mathbf{x}_{k+1})-\mathrm{H}(\mathbf{x}_k)})/{\mathrm{H}(\mathbf{x}_0)}$', fontsize=18)
ax.set_ylabel(r'$\epsilon_k$')
ax.set_xlabel(r'time $t$ (s)')
import matplotlib
matplotlib.rcParams.update({'font.size': 18})
ax.legend(loc=1, fontsize=13)
Numerical methods¶
Explicit Euler¶
$ \frac{\delta \mathbf x_k}{\delta t} = \mathbf{J_x}\,\nabla\mathrm H(\mathbf x_k)\quad \Rightarrow \quad \delta \mathbf x_k = \delta t\,\mathbf{J_x}\,\nabla\mathrm H(\mathbf x_k)$
def f_euler_exp(x, dt):
"State update with explicit Euler method"
x = x.flatten()
dx = dt*np.dot(Jx_num, dxH_num(x[0], x[1]))
return dx.flatten()
# Init list of (x1(k), x2(k))
x_euler_exp = list()
x_euler_exp.append(x0)
# Simulation
for k in np.arange(nt):
dx = f_euler_exp(x_euler_exp[k], ts)
x_euler_exp.append(x_euler_exp[k] + dx)
plot_trajs(x_euler_exp, 'Explicit Euler')


Implicit relation for the implicit Euler method¶
$\left\{\begin{array}{rcl} \frac{\delta \mathbf x_k}{\delta t} &=& \mathbf{J_x}\,\nabla\mathrm H(\mathbf x_{k+1}) \\ \mathbf x_{k+1} &=& \mathbf x_k + \delta \mathbf x_k \end{array}\right.\quad \Rightarrow \quad \mathbf x_{k+1}-\mathbf x_{k}-\delta t\,\mathbf{J_x}\,\nabla\mathrm H(x_{k+1}) = 0$
def f_euler_imp(xpost, x, ts):
"Implicit function associated to state update with implicit Euler method"
x = x.flatten()
xpost = xpost.flatten()
dx = f_euler_exp(xpost, ts)
return xpost - x - dx
# Init list of (x1(k), x2(k))
x_euler_imp = list()
x_euler_imp.append(x0)
# Simulation
for k in np.arange(nt):
xpost_init = x_euler_imp[k]
args = (x_euler_imp[k], ts)
sol = root(f_euler_imp, xpost_init, args=args)
xpost = sol.x
x_euler_imp.append(xpost)
plot_trajs(x_euler_imp, 'Implicit Euler')


Midpoint rule¶
$\left\{\begin{array}{rcl} \frac{\delta \mathbf x_k}{\delta t} &=& \mathbf{J_x}\,\nabla\mathrm H\left(\frac{\mathbf x_{k+1}+\mathbf x_{k}}{2}\right) \\ \mathbf x_{k+1} &=& \mathbf x_k + \delta \mathbf x_k \end{array}\right.\quad \Rightarrow \quad \mathbf x_{k+1}- \mathbf x_{k}-\delta t\,\mathbf{J_x}\,\nabla\mathrm H\left(\frac{\mathbf x_{k+1}+\mathbf x_{k}}{2}\right) = 0$
def f_midpoint(xpost, x, ts):
"Implicit function associated to state update with implicit Euler method"
x = x.flatten()
xpost = xpost.flatten()
dx = f_euler_exp((x+xpost)/2., ts)
return xpost - x - dx
# Init list of (x1(k), x2(k))
x_midpoint = list()
x_midpoint.append(x0)
# Simulation
for k in np.arange(nt):
xpost_init = x_midpoint[k]
args = (x_midpoint[k], ts)
sol = root(f_midpoint, xpost_init, args=args)
xpost = sol.x
x_midpoint.append(xpost)
plot_trajs(x_midpoint, 'Midpoint')


Trapezoidal rule¶
$\left\{\begin{array}{rcl} \frac{\delta \mathbf x_k}{\delta t} &=& \mathbf{J_x}\,\left(\frac{\nabla\mathrm H(\mathbf x_{k})+\nabla\mathrm H(\mathbf x_{k+1})}{2}\right) \\ \mathbf x_{k+1} &=& \mathbf x_k + \delta \mathbf x_k \end{array}\right.\quad \Rightarrow \quad \mathbf x_{k+1}-\mathbf x_{k}-\delta t\,\mathbf{J_x}\,\left(\frac{\nabla\mathrm H(\mathbf x_{k})+\nabla\mathrm H(\mathbf x_{k+1})}{2}\right)= 0$
def f_trapez(xpost, x, ts):
x = x.flatten()
xpost = xpost.flatten()
dx = (f_euler_exp(x, ts) + f_euler_exp(xpost, ts))/2.
return xpost - x - dx
# Init list of (x1(k), x2(k))
x_trapez = list()
x_trapez.append(x0)
# Simulation
for k in np.arange(nt):
xpost_init = x_trapez[k]
args = (x_trapez[k], ts)
sol = root(f_trapez, xpost_init, args=args)
xpost = sol.x
x_trapez.append(xpost)
plot_trajs(x_trapez, 'Trapezoidal')


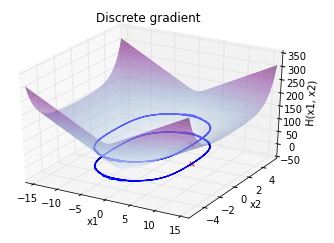
Discrete gradient method combined with (port-)Hamiltonian structure¶
$[\nabla_d\mathrm H(\mathbf x_k, \delta\mathbf x_k)]_i=\left\{\begin{array}{rl} \frac{\mathrm H(\mathbf x_k+\delta x_{k,i})-\mathrm H(\mathbf x_k)}{\delta x_{k,i}} &\mbox{if } \delta x_{k,i}>\mathtt{eps}, \\ \frac{\partial \mathrm H(\mathbf x_k)}{\partial x_i} &\mbox{either.}\end{array}\right.\quad \Rightarrow \quad \mathbf x_{k+1}-\mathbf x_{k}-\delta t\,\mathbf{J_x}\,\nabla_d\mathrm H(\mathbf x_k, \delta\mathbf x_k)= 0$
# Machine epsilon
eps = np.finfo(float).eps
def discretgradient(x, dx):
"Numerical evaluation of the discrete gradient of the Hamiltonian as defined in (22)"
x = x.flatten()
dx = dx.flatten()
dxH1 = (H_num(x[0]+dx[0], x[1])-H_num(x[0], x[1]))/dx[0] if dx[0]**2 > eps else dxH_num(x[0], x[1])[0,0]
dxH2 = (H_num(x[0], x[1]+dx[1])-H_num(x[0], x[1]))/dx[1] if dx[1]**2 > eps else dxH_num(x[0], x[1])[1,0]
return np.array([dxH1, dxH2])
def f_shp(xpost, x, ts):
x = x.flatten()
xpost = xpost.flatten()
dx = ts*np.dot(Jx_num, discretgradient(x, xpost-x))
return xpost - x - dx
# Init list of (x1(k), x2(k))
x_shp = list()
x_shp.append(x0)
# Simulation
for k in np.arange(nt):
xpost_init = x_shp[k]
args = (x_shp[k], ts)
sol = root(f_shp, xpost_init, args=args)
xpost = sol.x
x_shp.append(xpost)
plot_trajs(x_shp, 'Discrete gradient')


Results¶
from matplotlib.pyplot import figure, tight_layout, savefig
fig = figure()
ax = fig.add_subplot(2,3,1)
plot_traj_2D(x_euler_exp, title='Euler exp.', ax=ax)
ax.tick_params(
axis='x', # changes apply to the x-axis
which='both', # both major and minor ticks are affected
# bottom='off', # ticks along the bottom edge are off
# top='off', # ticks along the top edge are off
labelbottom='off') # labels along the bottom edge are off
ax.set_xlabel('')
ax = fig.add_subplot(2,3,2)
plot_traj_2D(x_euler_imp, title='Euler imp.', ax=ax)
ax.tick_params(
axis='x', # changes apply to the x-axis
which='both', # both major and minor ticks are affected
# bottom='off', # ticks along the bottom edge are off
# top='off', # ticks along the top edge are off
labelbottom='off') # labels along the bottom edge are off
ax.tick_params(
axis='x', # changes apply to the x-axis
which='both', # both major and minor ticks are affected
# bottom='off', # ticks along the bottom edge are off
# top='off', # ticks along the top edge are off
labelbottom='off') # labels along the bottom edge are off
ax.set_xlabel('')
ax.set_ylabel('')
ax.set_yticks(list())
ax = fig.add_subplot(2,3,3)
ax = fig.add_subplot(2,3,3)
plot_traj_2D(x_trapez, title='Trapeze', ax=ax)
ax.tick_params(
axis='both', # changes apply to the x-axis
which='both', # both major and minor ticks are affected
# bottom='off', # ticks along the bottom edge are off
# top='off', # ticks along the top edge are off
labelbottom='off') # labels along the bottom edge are off
ax.set_xlabel('')
ax.set_ylabel('')
ax.set_yticks(list())
ax = fig.add_subplot(2,2,3)
plot_traj_2D(x_midpoint, title='Point milieu', ax=ax)
ax = fig.add_subplot(2,2,4)
plot_traj_2D(x_shp, title='Grad. discret', ax=ax)
ax.set_ylabel('')
ax.set_yticks(list())
#tight_layout()
savefig('fs' + str(fs) + '.pdf')

Error on the energy balance¶
$\epsilon_k = \frac{\mathrm H(\mathbf x_{k+1})-\mathrm H(\mathbf x_k)}{\mathrm H(\mathbf x_0)}$
ax = plt.axes()
plot_delta_energy(ax=ax)
plt.savefig('error_energy_' + str(fs) + '.pdf')
