C++ and LaTeX code generation with Sympy¶
Antoine Falaize, CNRS UMR 7356 LaSIE, Université de la Rochelle, France
Conférence Python Scientifique
Université de La Rochelle - 14 Juin 2017 Read more
Why use SymPy¶
- Symbolic derivatives (optimization, nonlinear solvers, ...)
- C++ Code generation (performance, portability, ...)
- LaTeX Code generation (documentation, publication, ...)
Standard Python Import¶
In [1]:
import sympy as sp
# in IPythonNoteBook: activates pretty printing of mathematical functions
sp.init_printing(use_latex='mathjax')
Here: Simulation of a parametric Hamiltonian system¶
$${\small \begin{array}{rcl} \dot{\mathbf x} = \mathbf J \cdot \nabla H(\mathbf x), \qquad H(\mathbf x) = \frac{x_0^2}{2} + \operatorname{cosh}\left(\frac{10}{\pi}x_1\right) -1, \qquad \mathbf J(\tau) = \left( \begin{array}{rr} 0& -\tau^2 \\ \tau^2& 0 \end{array} \right). \end{array} }$$1. Basics: Definition of Symbols and Expressions¶
$${\small \begin{array}{rcl} \dot{\mathbf x} = \mathbf J \cdot \nabla H(\mathbf x), \qquad H(\mathbf x) = \frac{x_0^2}{2} + \operatorname{cosh}\left(\frac{10}{\pi}x_1\right) -1, \qquad \mathbf J(\tau) = \left( \begin{array}{rr} 0& -\tau^2 \\ \tau^2& 0 \end{array} \right). \end{array} }$$In [2]:
tau = sp.symbols('tau') # Symbol
tau
Out[2]:
In [3]:
x = list(sp.symbols('x:2')) # Vector (list of symbols)
x
Out[3]:
In [4]:
H = x[0]**2/2 + sp.cosh(10*x[1]/sp.pi)-1
H
Out[4]:
In [5]:
# Needed to plot inside Jupyter Notebook
%matplotlib inline
In [6]:
sp.plot(H.subs(x[0], 0), (x[1], -1, 1))

Out[6]:
In [7]:
sp.plot(H.subs(x[1], 0), (x[0], -1, 1))

Out[7]:
1. Basics: Definition of Symbols and Expressions¶
$${\small \begin{array}{rcl} \dot{\mathbf x} = \mathbf J \cdot \nabla H(\mathbf x), \qquad H(\mathbf x) = \frac{x_0^2}{2} + \operatorname{cosh}\left(\frac{10}{\pi}x_1\right) -1, \qquad \mathbf J(\tau) = \left( \begin{array}{rr} 0& -\tau^2 \\ \tau^2& 0 \end{array} \right). \end{array} }$$In [8]:
dxH = map(H.diff, x) # Vector (list of expressions)
dxH
Out[8]:
In [9]:
J = tau**2 * sp.Matrix([[0, -1], [1, 0]]) # Matrix (table of expressions)
J
Out[9]:
2. Symbolic Numerical Method: the Theta scheme¶
$$ \begin{array}{rcl} \mathbf 0 = \mathbf F(\delta \mathbf x) = \frac{\delta \mathbf x}{\delta t} - \mathbf J(\tau) \cdot \nabla H(\mathbf x_n + \theta\,\delta \mathbf x); \qquad \mathbf x_{n+1} = \mathbf x_n + \delta \mathbf x; \qquad x_0 \;\mbox{known}. \end{array} $$In [10]:
dt, theta = sp.symbols(('delta_t', 'theta'))
dx = map(lambda xi: sp.symbols('delta_'+str(xi)), x)
dtx = map(lambda dxi: dxi/dt, dx)
dtx
Out[10]:
2. Symbolic Numerical Method: the Theta scheme¶
$$ \begin{array}{rcl} \mathbf 0 = \mathbf F(\delta \mathbf x) = \frac{\delta \mathbf x}{\delta t} - \mathbf J(\tau) \cdot \nabla H(\mathbf x_n + \theta\,\delta \mathbf x); \qquad \mathbf x_{n+1} = \mathbf x_n + \delta \mathbf x; \qquad x_0 \;\mbox{known}. \end{array} $$In [11]:
subs = {}
for i, xi in enumerate(list(x)):
subs[xi] = xi + theta*dx[i]
dxH = [dxHi.subs(subs) for dxHi in dxH]
dxH
Out[11]:
In [12]:
F = map(sp.Add, dtx, (-J).dot(dxH))
In [13]:
F
Out[13]:
3. Numerical evaluation of symbolic expressions¶
$$ \begin{array}{rcl} \mathbf 0 = \mathbf F(\delta \mathbf x) = \frac{\delta \mathbf x}{\delta t} - \mathbf J(\tau) \cdot \nabla H(\mathbf x + \theta\,\delta \mathbf x); \qquad \mathbf x_{n+1} = \mathbf x_n + \delta \mathbf x; \qquad x_0 \;\mbox{known}. \end{array} $$In [14]:
pars = [tau, dt, theta]
In [15]:
args = dx + x + pars
In [16]:
F_lambdify = sp.lambdify(args, F, modules='numpy')
def F_num(*args): # Recast output as numpy array
return np.array(F_lambdify(*args))
In [17]:
import numpy as np
F_num(*np.random.rand(7)) # Evaluate with random values
Out[17]:
4. Newton-like solvers need the Jacobian of implicit function¶
$$ \delta \mathbf x_{i+1} = \delta \mathbf x_i + \mathcal J_{\mathbf F}(\delta \mathbf x_i)^{-1}\cdot\mathbf F(\delta \mathbf x_i); \qquad [\mathcal J_{\mathbf F}(\delta \mathbf x_i)]_{k,l} = \frac{\partial [\mathbf F]_{k}}{\partial [\mathbf \delta \mathbf x]_{l}} $$In [18]:
nF, ndx = len(F), len(dx)
jacF = sp.zeros(nF, ndx) # Init sympy matrix
In [19]:
for k in range(nF):
for l in range(ndx):
jacF[k, l] = sp.diff(F[k], dx[l]).simplify() # derivative
In [20]:
jacF
Out[20]:
In [21]:
jacF_num = sp.lambdify(args, jacF, modules='numpy') # Build numerical function
Here, we use SciPy root finding method¶
In [22]:
from scipy.optimize import root
Need to parse SymPy functions to SciPy solvers¶
In [23]:
def scipy_func(dx, x, pars):
return F_num(*(list(dx)+list(x)+pars))
def scipy_jacfunc(dx, x, pars):
return jacF_num(*(list(dx)+list(x)+pars))
6. Simulation¶
Parameters¶
In [24]:
dt_num = 1e-1 # Sample period (s)
tau_num = 1. # Parameter: System characteristic time (s)
theta_num = 0.5 # Scheme parameter: 0=Euler Explicit, 1=Euler implicit, 0.5=Midpoint rule
pars_num = [tau_num, dt_num, theta_num]
In [25]:
nt = int(1e4) # Number of time steps
x0 = [1., 0.] # State init.
In [26]:
X_seq = np.zeros((len(x), nt)) # Sequence
X_seq[:, 0] = x0
In [27]:
DX_seq = np.zeros((len(dx), nt)) # Sequence
Execution¶
In [28]:
for i in range(1, nt):
X_seq[:, i] = X_seq[:, i-1] + DX_seq[:, i-1] # x[i] = x[i-1] + dx[i-1]
res = root(scipy_func, DX_seq[:, -i], (X_seq[:, i], pars_num), jac=scipy_jacfunc)
DX_seq[:, i] = res.x # F(dx[i]) = 0
Plot of results¶
In [29]:
import matplotlib.pyplot as plt # Plot module
In [30]:
plt.plot(X_seq[0, :], X_seq[1, :]) # Plot trajectory (blue)
plt.plot(X_seq[0, 0], X_seq[1, 0], 'or') # Add a red dot at init
plt.grid('on') # Display grid

7. C++ Code Generation with SymPy¶
In [31]:
from sympy.printing import ccode
Single expression¶
In [32]:
H # Recall
Out[32]:
In [33]:
ccode(H, dereference=args) # Print C++ code
Out[33]:
Matrix expression (via a template)¶
In [34]:
def cpp_generator(mat, args, name, label):
update_cpp = '\nvoid {0}::{1}_update()'.format(label, name) + '{'
for n in range(mat.shape[1]):
for m in range(mat.shape[0]):
expr = mat[m, n]
symbs = expr.free_symbols
c = ccode(expr, dereference=args)
update_cpp += '\n_{0}({1}, {2}) = {3};'.format(name, m, n, c)
update_cpp += '\n};'
return update_cpp
In [35]:
F # Recall
Out[35]:
In [36]:
label = 'myobject'
mat = sp.Matrix(F)
name = 'F'
code = cpp_generator(mat, args, name, label) # Print C++ code
print(code)
Matrix expression (via a template)¶
In [37]:
jacF # Recall
Out[37]:
In [38]:
label = 'myobject'
mat = jacF
name = 'jacF'
code = cpp_generator(mat, args, name, label) # Print C++ code
print(code)
8. LaTeX Code Generation with SymPy¶
In [39]:
from sympy.printing import latex
Single expression¶
In [40]:
H # Recall
Out[40]:
In [41]:
print(latex(H)) # Print latex code
Render: $$ \frac{x_{0}^{2}}{2} + \cosh{\left (\frac{10 x_{1}}{\pi} \right )} - 1 $$
Matrix expression¶
In [42]:
jacF # Recall
Out[42]:
In [43]:
print(latex(jacF)) # Print latex code
Render: $$ \left[\begin{matrix}\frac{1}{\delta_{t}} & \frac{100 \theta}{\pi^{2}} \tau^{2} \cosh{\left (\frac{1}{\pi} \left(10 \delta_{x1} \theta + 10 x_{1}\right) \right )}\\- \tau^{2} \theta & \frac{1}{\delta_{t}}\end{matrix}\right] $$
Conclusions¶
- Standard workflow:
- Define SymPy symbols and Expressions,
- Combine these objects in a class,
- Generate C++ code via templates,
- Use CMake for crossplatform builds,
- Save results to disk for large data and Python $\leftrightarrow$ C++ exchange
Conclusions¶
- SymPy can be used to
- Manipulate and simplify complex expressions in pure Python
- Build Structured Mathematical Object
- Generate code for Simulation (C++) and Documentation (LatTeX)
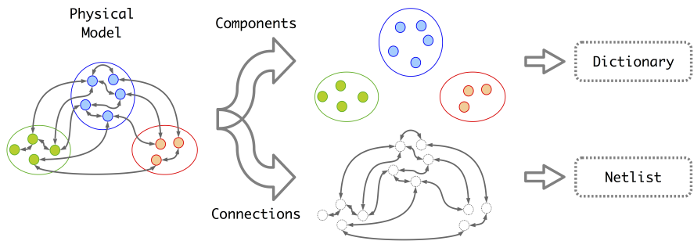
Example: the PyPHS package¶
Graph modeling and Simulation of Multiphysical systems in the Port-Hamiltonian Systems formalism.
Example: the PyPHS package¶
Graph modeling and Simulation of multiphysical systems in the Port-Hamiltonian Systems formalism.
